Lab Weeks - Dag 6
Aan het einde van dag 5 hadden we een rijdende auto die door gebruik te maken van de proximity sensor niet tegen dingen aan ging rijden. Hier waren we ondertussen al erg tevreden over. Toch begonnen we op dag 6 met het bedenken van nieuwe functionaliteiten voor de robothond DOG-E. Het product wat we tot nu toe hadden zagen we eigenlijk als minimum viable product. Op dit moment hadden we dus een autootje die naar voren kon rijden. Bij een obstakel werd er naar rechts en naar achter gereden om de auto te draaien. Zo kon de auto vanzelf verder met zijn avontuur. Er waren echter een hoop dingen waar we nog niet helemaal tevreden over waren. Zo stuurt de auto dus niet vanzelf, alleen als er een obstakel wordt gesignaleerd. Dat vonden we jammer, want we wilden eigenlijk dat de auto dingen zou kunnen die een normale hond ook zou kunnen, zoals apporteren of een persoon volgen. We hebben gekeken naar het gebruiken van sensoren zoals bluetooth, gps en wifi maar deze bleken allemaal problemen te bevatten voor onze use-case. Zo was het erg lastig om de auto nauwkeurig iemand te laten volgen of om iets te vinden. Uiteindelijk hebben we deze ideeën dus moeten schrappen. Wel kwamen we met een aantal ideeën. Momenteel rijdt de auto vanzelf naar voren, maar je zou de auto ook naar voren kunnen laten rijden als er iets vlak voor gesignaleerd wordt. Hiermee hadden we een spel bedacht, maar dat bleek niet echt een geschikt concept bij een robothond.
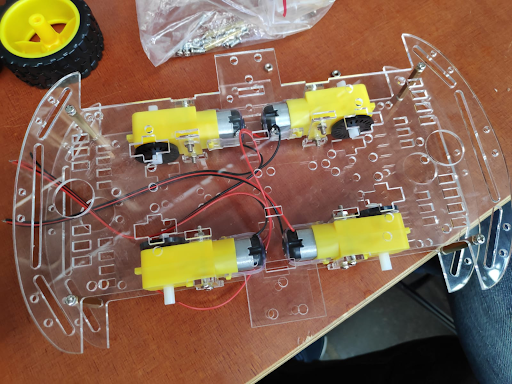
Uiteindelijk hebben we in overleg met een aantal docenten besloten om af te zien van deze extra ideeën. De focus lag nu op het perfectioneren van het minimum viable product. Zo hebben we een probleem opgelost: De wielen blokkeerden af en toe waardoor de auto stil viel. Dit probleem ontstond omdat er aan de andere kant van de as ook een wiel zat wat te strak was aangedraaid. Door deze wielen losser te maken was het probleem verholpen. We hebben echter besloten om de wielen totaal te verwijderen omdat ze voor ons concept geen doel meer hadden. Het doel was namelijk om de auto rechter te laten rijden. De auto rijdt echter al voldoende rechtdoor. De auto reedt in het verleden af en toe niet goed recht door omdat er niet genoeg stroom ging naar alle 4 de motoren. Op de onderstaande foto zien we goed om welke wielen het ging. De wielen waarmee gereden wordt zijn op deze foto namelijk nog niet gemonteerd.
Naast het fixen van bugs zijn we vandaag ook bezig geweest met het monteren van de hond op de auto.
Het visuele team heeft op de juiste plaatsen de honden knuffel losgeknipt waardoor deze netjes op de auto past.
We zijn vandaag ook erg bezig geweest met het nadenken over de juiste packaging (wat zetten we waar, etc).
We hadden aan het begin van de dag maar weinig onderdelen maar nog minder ruimte.
Uiteindelijk hebben we besloten om extra spacers in te zetten.
Hierdoor zijn de twee doorzichtige stukken plexiglas verder uit elkaar komen te staan, waardoor we meer ruimte hadden voor de onderdelen.
Zo hebben we bijvoorbeeld de Arduino aan de onderkant van het bovenste stuk plexiglas gemonteerd.
Deze ruimte werd oorspronkelijk ingenomen door de motoren, maar deze ruimte kwam vrij na het monteren van de extra spacers tussen de twee stukken plexiglas.
Uiteindelijk is packaging voor de gebruiker niet interessant omdat ze de techniek eigenlijk niet zien.
We willen eigenlijk ook dat de gebruiker de techniek zo min mogelijk kan zien, omdat het anders de immersie verstoord.
Toch was het voor ons een belangrijke stap. Het technische team en het visuele team hadden namelijk al een aantal functies klaarstaan die gemonteerd konden worden,
maar waar nog maar weinig ruimte voor was. Zo hadden we dus de LEDs die we wilden inzetten als ogen,
een audio module waarmee we blafgeluiden wilden laten afspelen en een kleine servomotor die we al succesvol hadden getest als kwispelende staart.
Daarnaast hebben we ook besloten om een kleine batterij module te bestellen voor de volgende dag. Hiermee besparen we nog meer ruimte,
omdat we van 1 batterij module en een powerbank naar alleen 1 module kunnen. Ook hadden we nog een proximity sensor besteld, zodat de auto ook achter zich kan zien.
Zo kunnen we ook in extreem nauwe omgevingen de auto draaien. Persoonlijk moest ik gelijk aan de volgende scène van Austin Powers denken:
Aan het einde van de dag hadden we dus eindelijk een geschikte, ruime, draadloze auto waarop we alle geteste onderdelen konden monteren. Zie onderstaande video voor een korte demonstratie.
Morgen gaan we verder met alle onderdelen in de auto verwerken, gaan we de code samenvoegen tot 1 geheel en kunnen we hopelijk het project min of meer afronden, zodat we op donderdag en vrijdag de laatste puntjes op de i kunnen zetten.